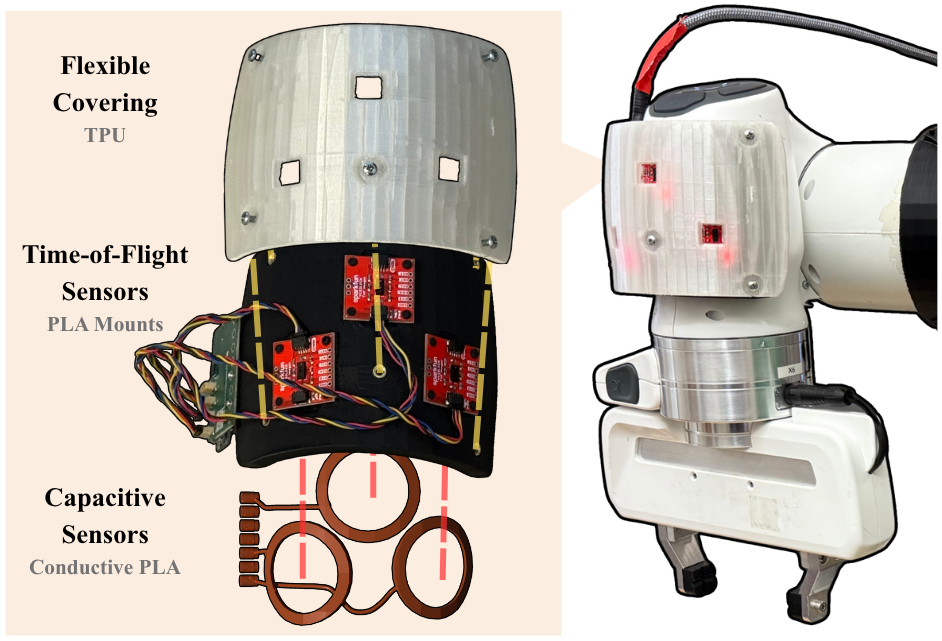
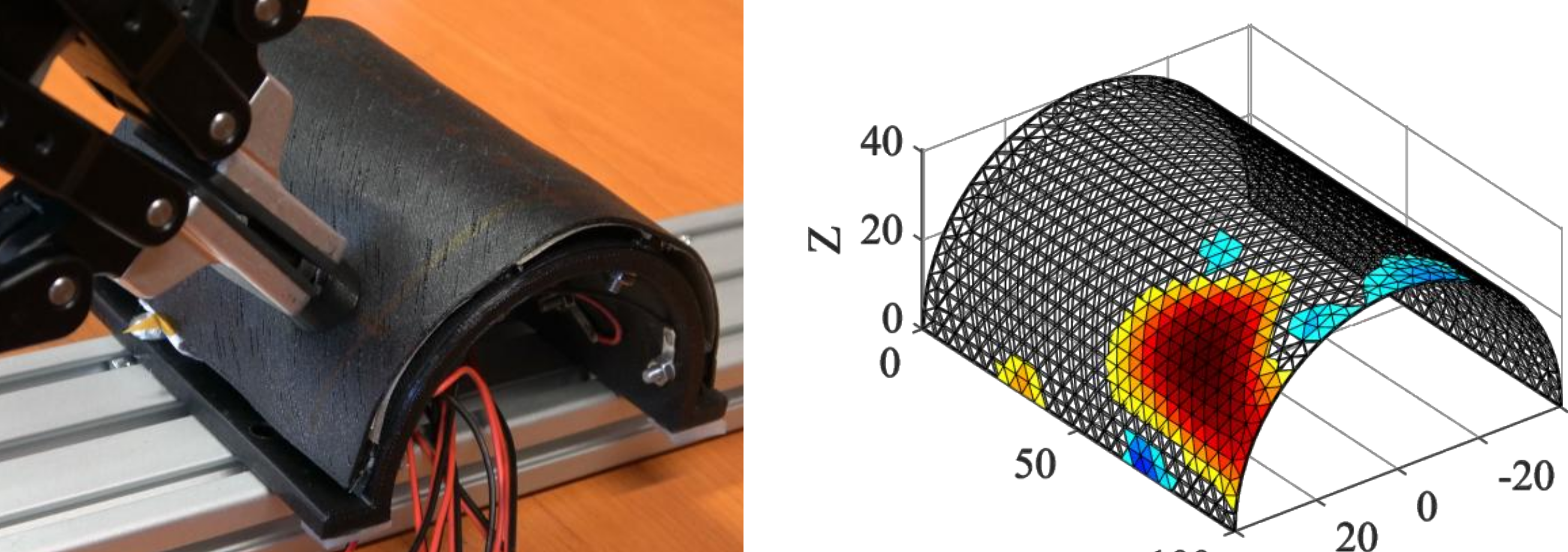
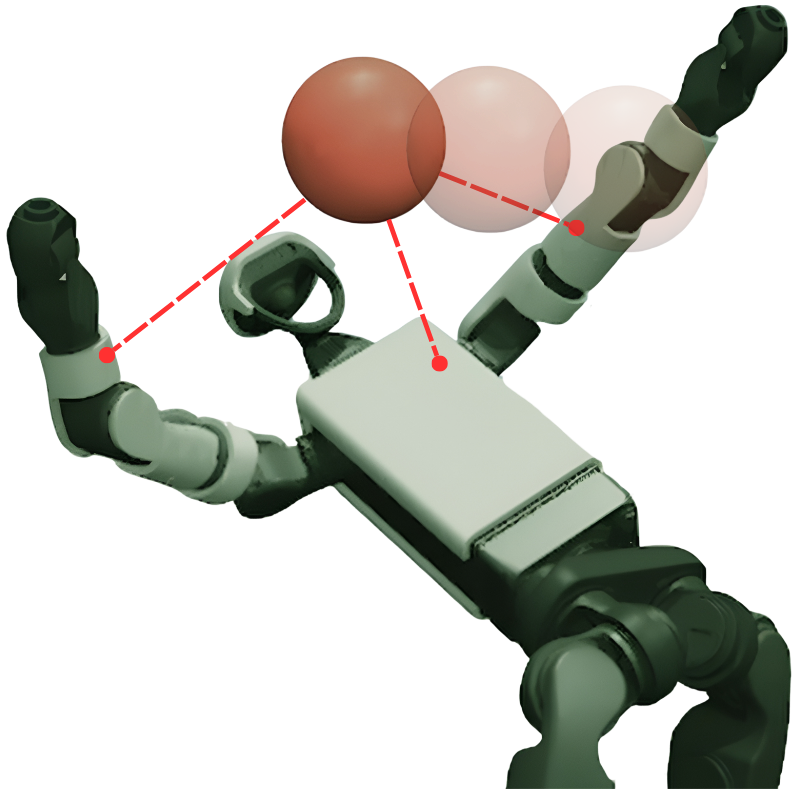
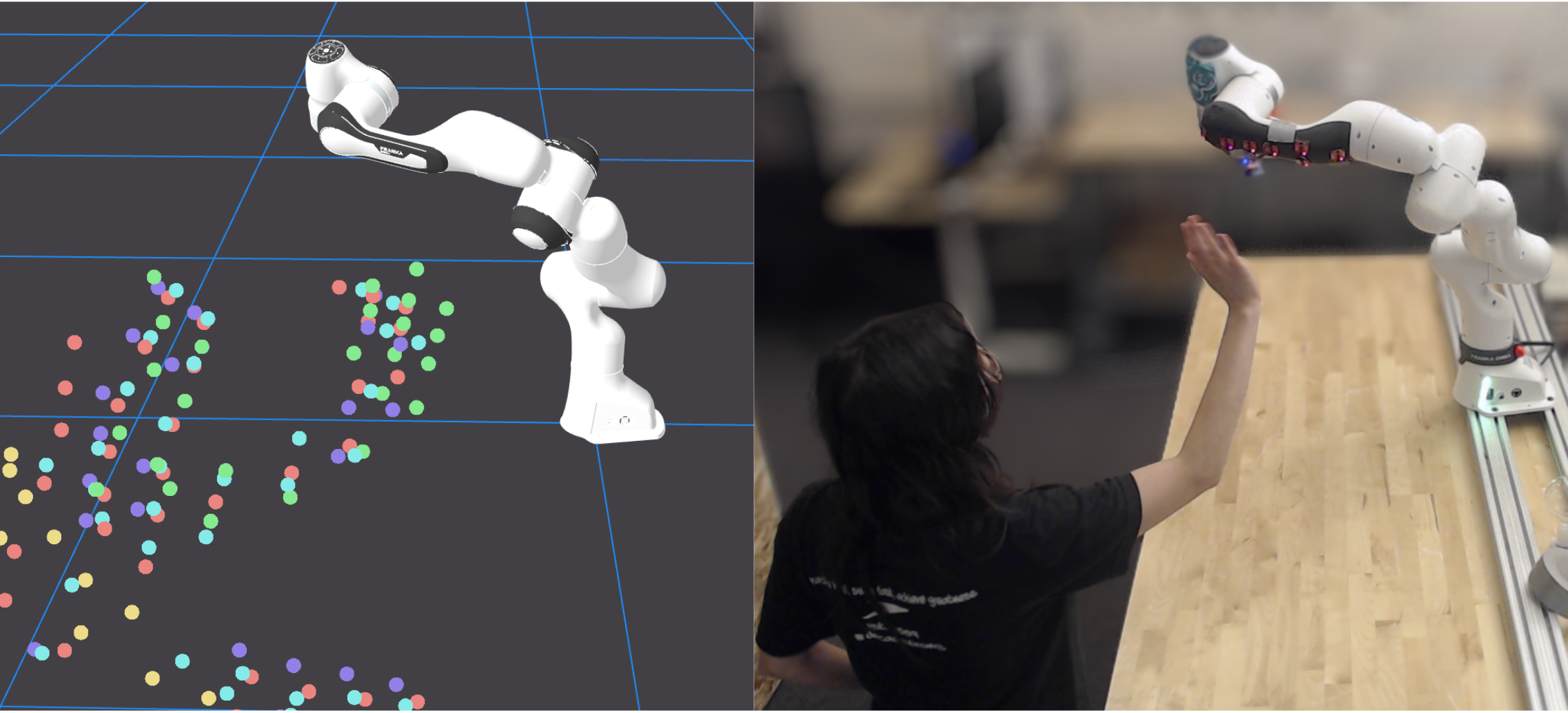
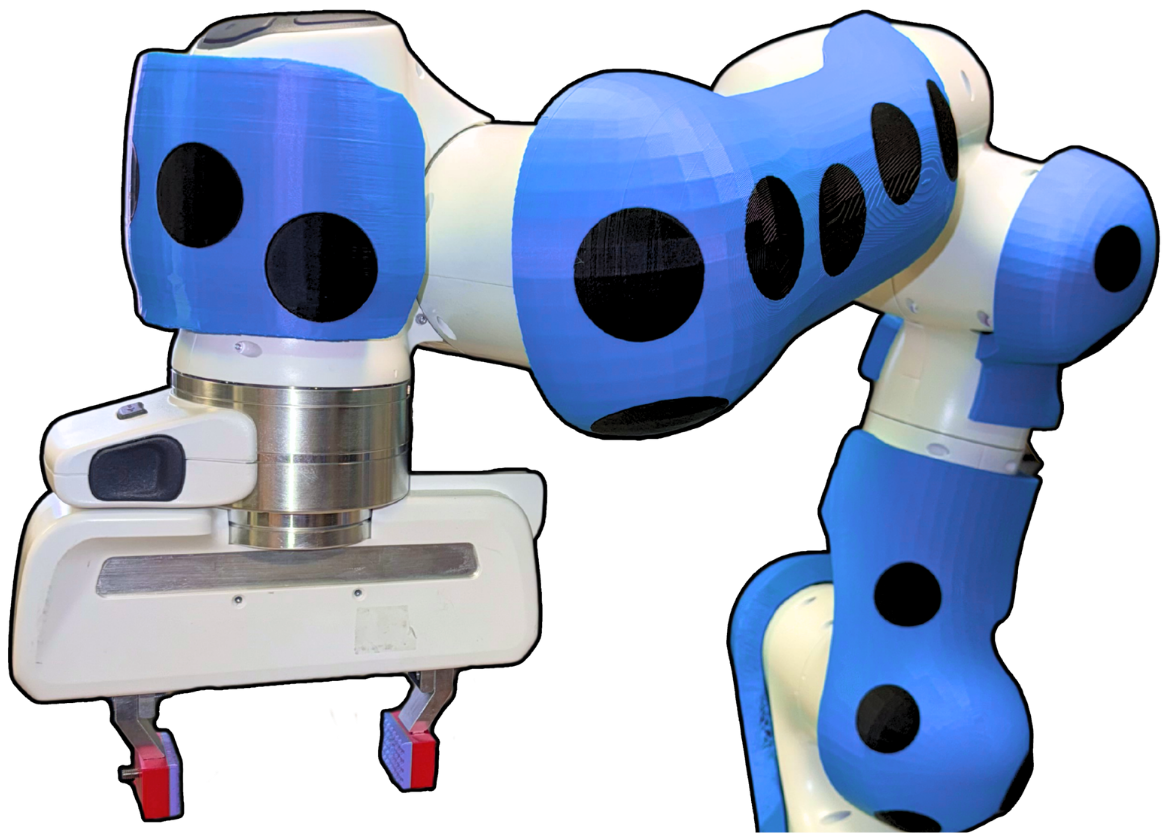
The GenTact Toolbox provides computational tools for creating versatile whole-body tactile skins tailored to both robot shape and application.






For questions and collaborations, please email carson.kohlbrenner@colorado.edu or visit the HIRO Group website.