Due to the strict nature of collision checking robots are limited in their ability to make contact with their surroundings. This makes is difficult to complete real-world tasks, such as:
- Reaching in clutter
- Rearranging objects
- Navigating tight spaces
To address these issues, we present a novel sampling-based optimization planner named Contact Admissible Transition-based RRT (CAT-RRT), which:
- Uses a per-link cost heuristic to prioritize motion with links that are unrestricted by contact
- Generates feasible trajectories that admit contact with objects
We show that this approach lead to paths with a better balance between path length, computation cost, and contact.
Take a look at the project website for more information and supplementary material!
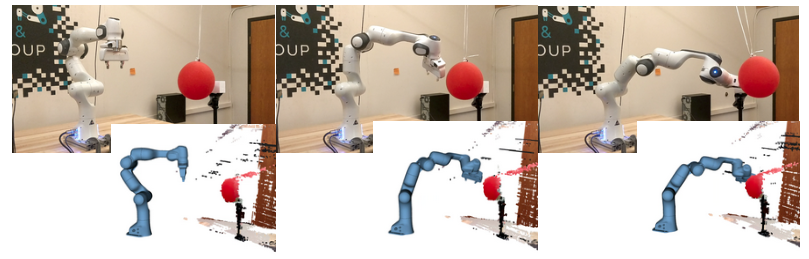
Screenshots of CAT-RRT operating on a real-life robot. The planner allows the robot to make soft contact with the red balloon by mitigating the reliance on collision queries through a novel cost function.