Contents
Try Out Visual Studio Code’s URDF Previewer!
Sometimes, running a software like Gazebo becomes tedious if you’re trying to see that your urdf model looks correct. You can avoid this by using the URDF previewer that is conveniently part of the ROS extension in Visual Studio Code.
1 Preliminary Steps
First, make sure that you have Visual Studio Code installed. It can be installed (for Windows, Linux, and Mac) here.
Once VS Code is installed, you will want to open a catkin workspace from there. For example, let’s say that you have your workspace folder named catkin_ws. Since catkin_ws is a catkin workspace, you can do code catkin_ws, which will open a running instance of VS Code containing all of the contents of that directory. Below is an example:
mkdir -p catkin_ws/src
cd catkin_ws/src
# get some ROS packages, write some code
cd ..
# build the packages within the workspace
catkin_make
# OR
catkin build
# Opens VS Code instance containing catkin_ws contents
code .
2 Installing the Extension
Once VS Code is up and running, type Ctrl+Shift+X to go to the Marketplace, where we can get some awesome extensions. Here’s what the Marketplace looks like (it’s the section on the left):
VS Code's Marketplace
The extension you’ll need is the ROS extension (it’s the first result that shows up when you type in ROS, as shown below). Install this package, and make sure that it is is enabled, shown below:
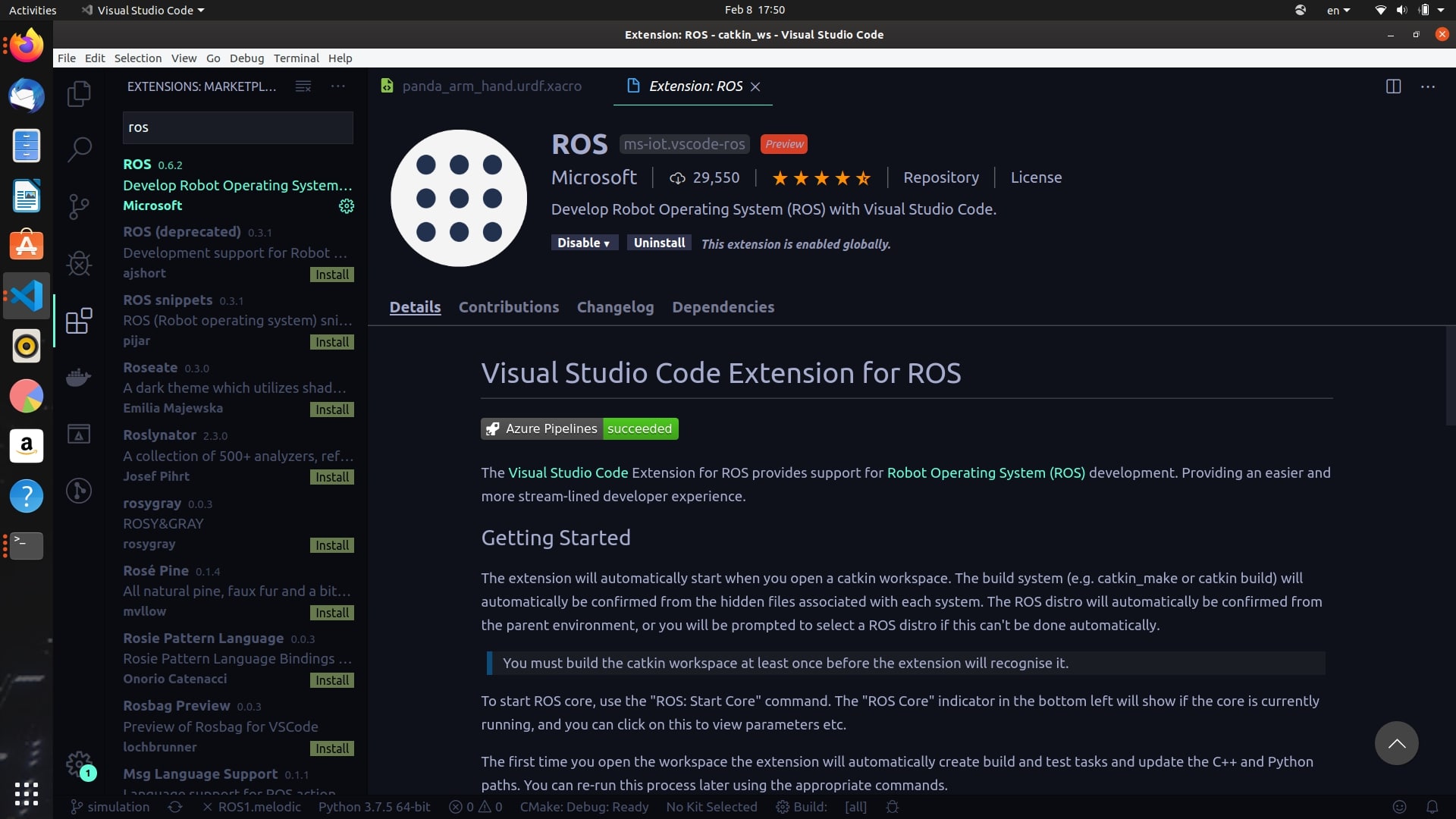
The awesome ROS Extension
3 Usage
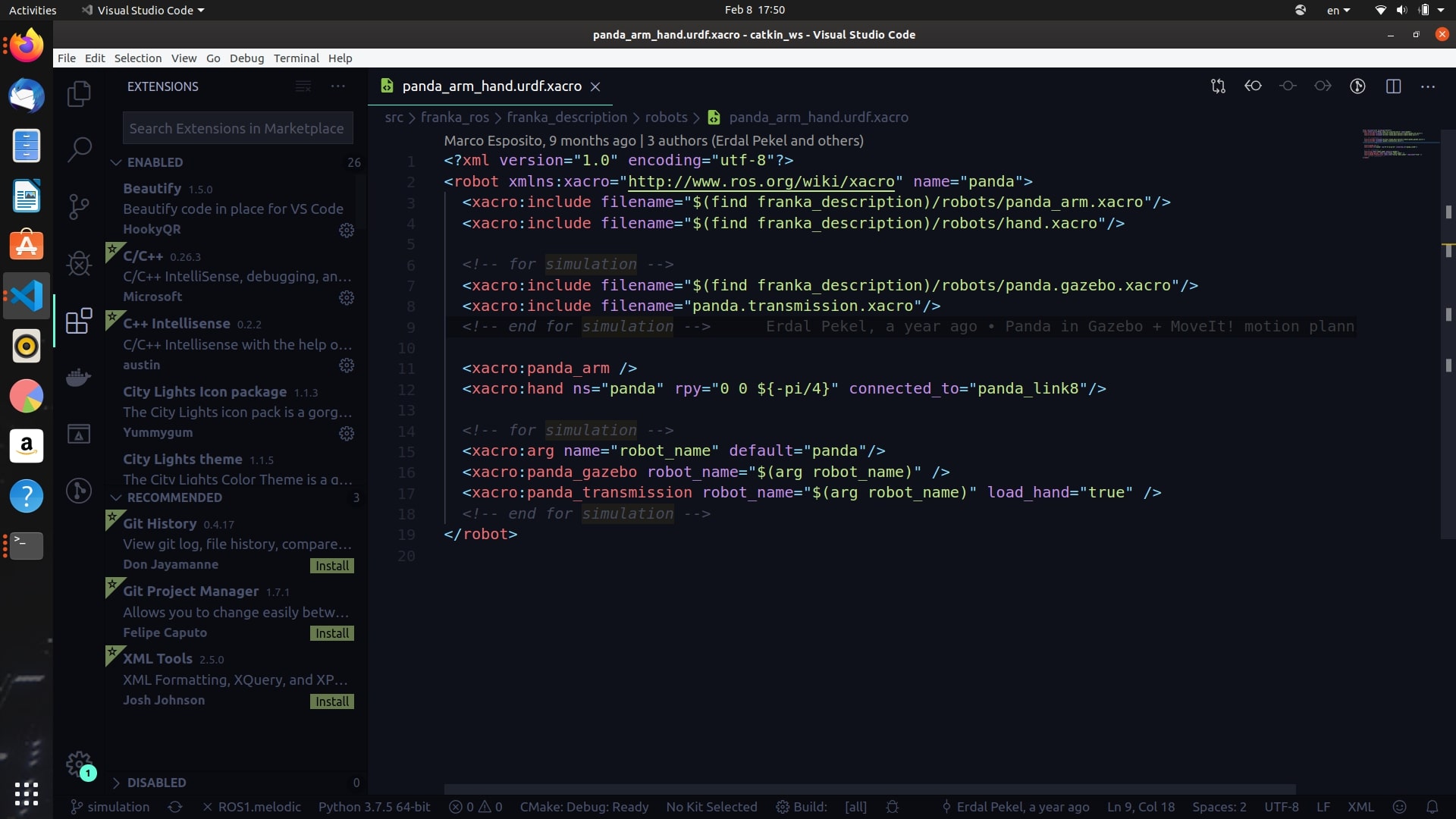
In order to use the ROS extension, first, go to a .urdf file (or .urdf.xacro file, either works), click on it, and then press Ctrl+Shift+P to be able to search for the extension usage.
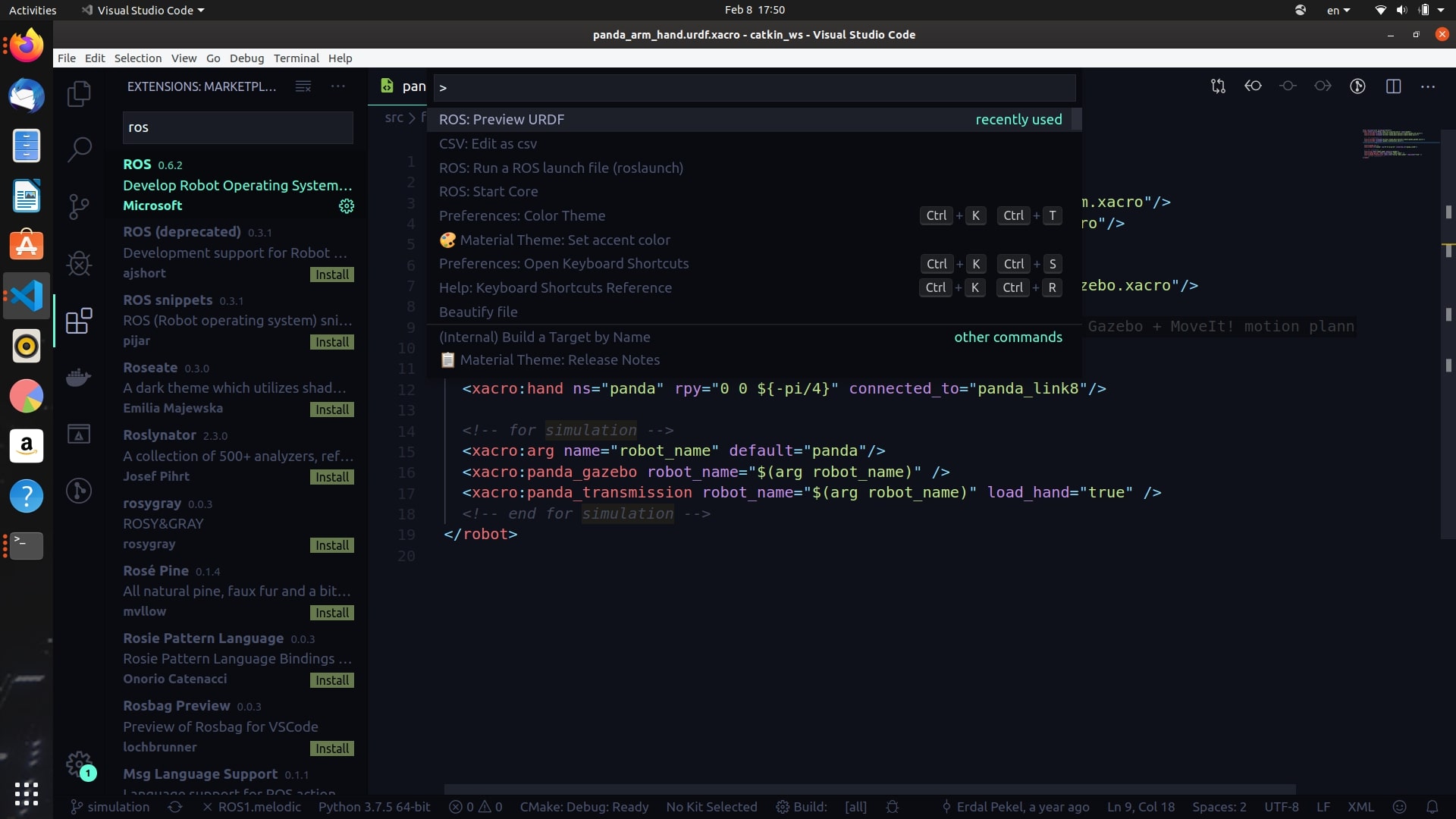
Searching for Extensions
As you type in ROS, the option ROS: Preview URDF will show up. Make sure to click on that option.
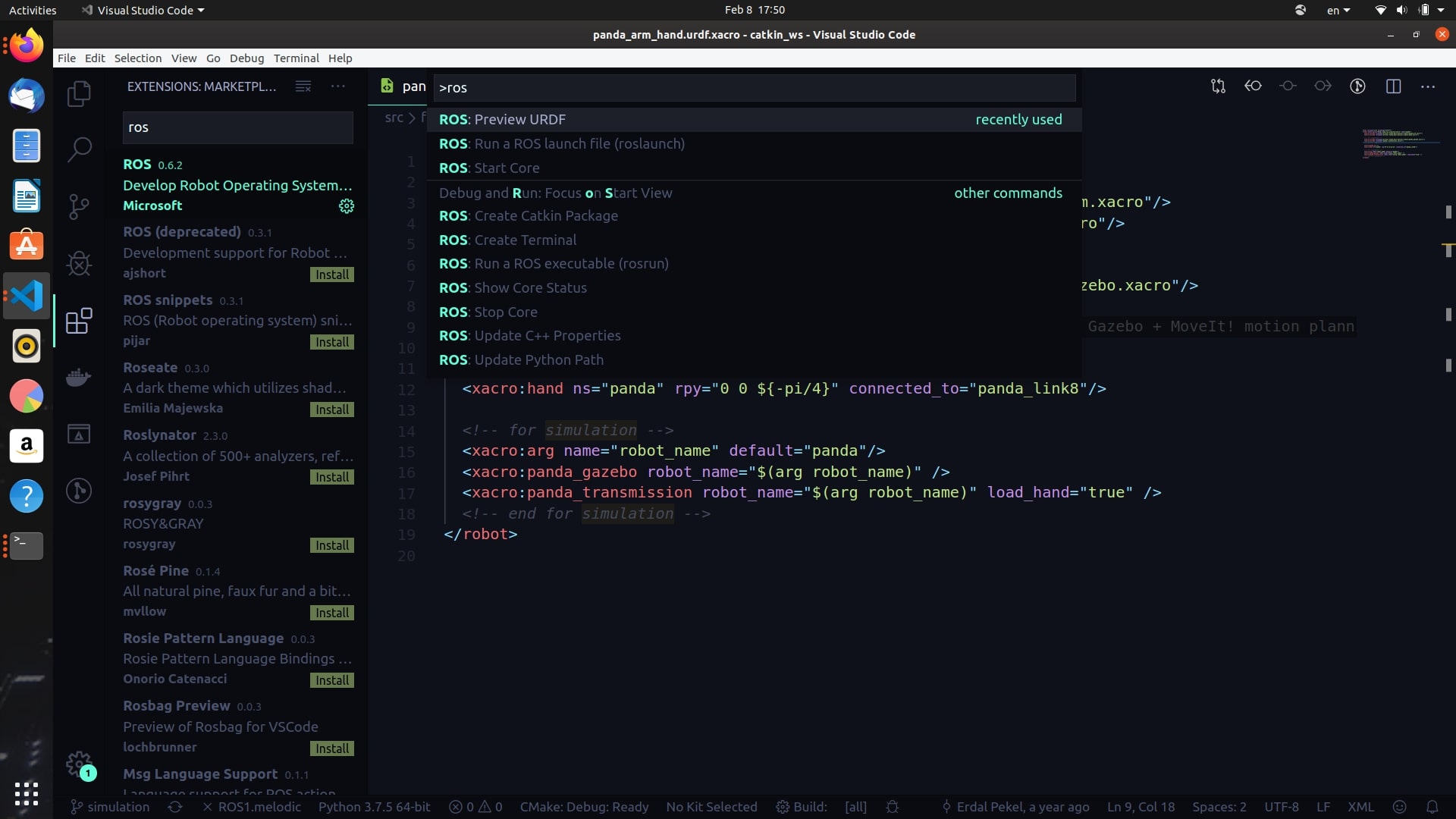
Preview URDF option
Once that option is clicked, you should be able to see what the model will look like. An example is shown below.
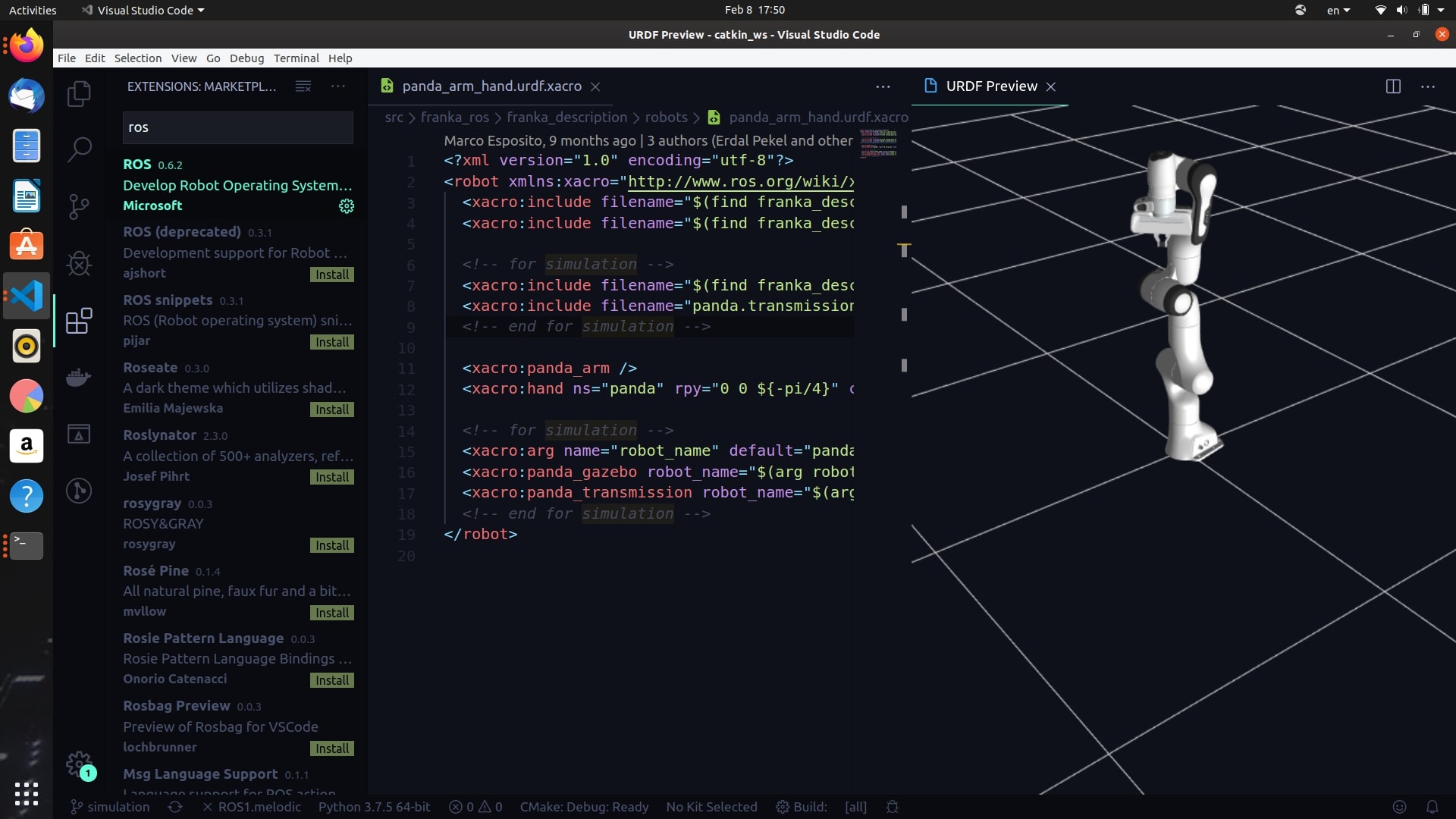
Franka Panda's urdf file
Side note: Make sure that you have not opened VS Code within the directory of a ROS package; make sure that you have happened VS Code from the root of a catkin workspace.
Enjoy!