GitHub repository: [link]
Contents
We have developed a ROS package for gaze and emotion detection, based on the widely available OpenFace library. Our work integrates OpenFace with the ROS ecosystem.
Our work integrates OpenFace with the ROS ecosystem.
The software in this repository has been developed for, and tested on, an Intel Realsense and a Sawyer Research Robot—a widely used platform for research in Human-Robot Collaboration. Nonetheless, it is easy to customize to any robotic platform that shares similar hardware features.
Installation
This tutorial should be useful regardless of your skill level, from a first-time ROS user to an experienced engineer.
Prerequisites
System Dependencies
This repository needs openface and realsense. To install, compile and test openface package, please refer to the installation tutorial in openface github wiki page. Also, for realsense package, please refer to the installation tutorial in realsense github page.
ROS Dependencies
This repository supports ROS kinetic. Here’s a recently guide on how to install ROS.
Catkin Tools
We use the new Catkin Command Line Tools catkin_tools, a Python package that provides command line tools for working with the catkin meta build system and catkin workspaces. The following instructions apply to this new package, even though the repository can be used and compile with the old catkin_make without issues.
sudo apt-get install python-catkin-tools
Execution on the robot
Initial steps
- Turn on the robot. Wait for the robot to finish its start-up phase.
- Be sure that the system you’re running the code has access to the Sawyer robot. This is usually done by running the
intera.shscript that should be provided in your Sawyer installation. See here for more info. - Connect Realsense camera with USB 3.0 port in your computer.
How to run this package
After cloning and building this repo, you need to launch the enviroment we need, which include realsence and sending a new urdf into Sawyer robot. Then, you can run the sample code called openface_realsense in this package:
roslaunch openface_ros openface_ros.launch
rosrun openface_ros openface_realsense
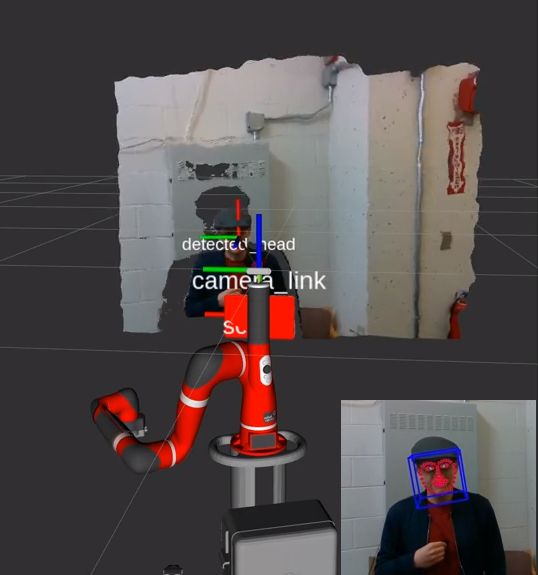
In openface_realsense, we first initialize an OpenFaceRos object, and it will detect human’s gaze and emotion and also pop out a screen with pose, gaze firection on user’s face.
Functions of OpenFace_Ros
Most of the core functions are implemented in openface_ros.cpp. Belows are details of some important functions in OpenFaseRos.
-
OpenFaceRosconstructor: For constructor, we need focal length, center of realsense, threshold of distance betwenn gaze vector and target and a flag enable action unit or not. -
getNose, getLeftPupil, getRightPupil: These three function will give you position of nose, left pupil and right pupil individually. The location is pixel-based, which means location in showing image.
More information
Meshes
This folder is for CAD files that we can show different objects (realsense) in simulators like rviz and gazebo. For now, we only have model for realsense camera, but in the future we might need more files so we create this folder.
Sending urdf Fragments
Because we want an extra realsense model mount on Sawyer robot, we need to add an extra link and joint into our urdf. To do this, we use send_urdf_fragment from intera_sdk, which can send exclusion links and joints to Sawyer robot. In launch file, we called send_urdf_fragment with our urdf file in urdf folder to connect realsense with Sawyer.