Substantial effort has been invested in expanding the role of robots into a multitude of new domains, from schools, to grocery stores, to warehouses.
But as robots are increasingly expected to work in close quarters or even interact with humans, the challenges in human-robot interaction have become more pronounced.
Behaviors that allow robots to engage with humans safely, efficiently, and smoothly are difficult to create, which is exacerbated by human perceptions of and responses to robots, which is itself still an open problem.
The goal of this subteam is to create robot behaviors that make robots more effective teammates and collaborators with humans. We use an interdisciplinary approach, leveraging machine learning, cognitive science, and social psychology to make robots more predictable, legible, and safe around humans. This subteam works with a variety of collaborators to conduct foundational research and run human-subjects studies to validate these approaches.
Contents
1. Projects
1.1 Hierarchical Human-Agent Interaction
Students: Stéphane Aroca-Ouellette
Publications:
- S. Aroca-Ouellette, M. Aroca-Ouellette, U. Biswas, K. Kann, and A. Roncone, “Hierarchical Reinforcement Learning for Ad Hoc Teaming” in Proceedings of the 2023 International Conference on Autonomous Agents and Multiagent Systems (AAMAS), 2023. [PDF] [BIB]
In collaborative tasks, humans excel at adapting to their partners and converging toward an aligned strategy to maximize team success.
This is an inherently human skill that current state-of-the-art machine learning models largely lack.
We contend that this gap stems from the traditional focus on learning human-agent interaction from low-level primitive actions, whereas human collaboration centers around high-level strategies.
To address this, we introduce HAHA: Hierarchical Ad Hoc Agents, a novel framework using hierarchical reinforcement learning to train an agent capable of navigating the intricacies of ad hoc teaming at a level of abstraction more akin to human collaboration.
HAHA consists of a Worker and a Manager, which respectively focus on optimizing efficient sub-task completion and high-level team strategies.
We evaluate HAHA in the Overcooked environment, demonstrating that it outperforms existing baselines in both quantitative and qualitative metrics, offering improved teamwork, better resilience to environmental shifts, and heightened agent intelligibility.
Furthermore, we show that the generalization ability of HAHA extends to changes in the environment and that our structure allows for the induction of new strategies not encountered during training.
We posit that the advancements proposed in this paper form a crucial building block toward the realization of safer and more efficient human–AI teams.
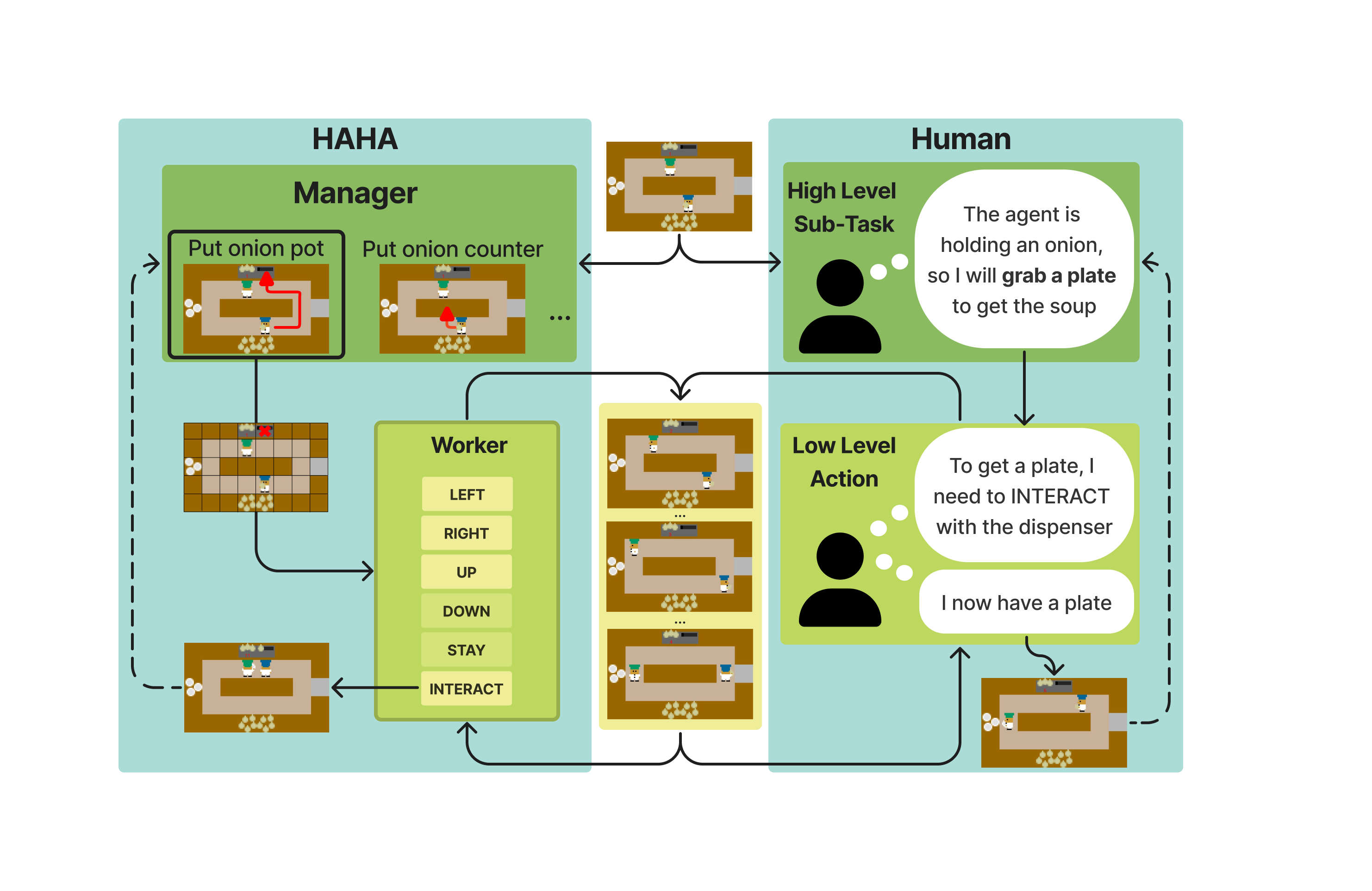
Architecture of the Hierarchical Ad Hoc Agents (HAHA). Similar to a human, the manager first selects which high-level task to accomplish next. The low-level worker then takes over to carry out the task.
1.2 Predictability in HRI
Students: Clare Lohrmann
Publications
- C. Lohrmann, E. Berg, B. Hayes, and A. Roncone, “Improving Robot Predictability via Trajectory Optimization Using a Virtual Reality Testbed,” in 7th International Workshop on Virtual, Augmented, and Mixed-Reality for Human-Robot Interactions (VAM-HRI), 2024. [PDF] [BIB]
- C. Lohrmann, M. Stull, A. Roncone, and B. Hayes “Generating Pattern-Based Conventions for Predictable Planning in Human-Robot Collaboration,” in ACM Transactions on Human-Robot Interaction, 2024. [PDF] [BIB]
For humans to effectively work with robots, they must be able to predict the actions and behaviors of their robot teammates rather than merely react to them. While there are existing techniques enabling robots to adapt to human behavior, there is a demonstrated need for methods that explicitly improve humans’ ability to understand and predict robot behavior.
Our methods leverage the innate human propensity for pattern recognition and abstraction in order to improve team dynamics in human-robot teams and to make robots more predictable to the humans that work with them. Patterns are a cognitive tool that humans use and rely on often, and the human brain is in many ways primed for pattern recognition and usage. In this research stream we lean into human cognitive tendencies to improve human-robot teaming and human perceptions of their robot teammates.

The setup for experiments conducted for our THRI journal article, where participants played a coordination game with a Sawyer robot.
In our most recent work, we introduce PACT, a method for setting conventions for a human-robot team using patterns that humans can recognize. Our method emphasizes using human-visible features of the game setting, such as color, shape, and location to form these patterns. PACT selects a pattern-based convention that is both a deterministic and unique as possible. In this way, if the human knows the pattern, they will know what comes next (determinism), and the robot’s behavior cannot be explained by another pattern (unique). Our experiment shows that by emphasizing predictability via pattern-based conventions, we can not only improve human-robot performance on a coordination task, but PACT also increases positive perceptions of the robot and its contributions to the team.
1.3 Interactive Task and Role Assignment for Human Robot Collaboration
Postdoc: Jake Brawer
Students: Kayleigh Bishop
Publications*
- J. Brawer, K. Bishop, B. Hayes, and A. Roncone, “Towards A Natural Language Interface for Flexible Multi-Agent Task Assignment,” in 2023 AAAI Fall Symposium on Artificial Intelligence for Human-Robot Interaction (AI-HRI), 2023. [PDF] [BIB]
Task assignment and scheduling (TAS) algorithms are powerful tools for coordinating large teams of robots, AIs, or humans with optimality and safety guarantees.
However, standard optiization-based techniques for TAS require deep technical knowledge to design, and are far too rigid to handle the complexities of many real-world, high-stakes tasks.
Large language models (LLMs) like ChatGPT, in contrast, are extraordinarily flexible and capbale of wide-ranging feats of generalized reasoning, though lack these desired gaurantees.
Our ongoing work seeks to narrow the gap between human ingenuity and algorithmic efficiency by enabling users to shape, update, and modify TAS systems entirely via LLM-mediated, interactive dialogue.
We are confident that this approach will not only enhance the efficiency and flexibility of task management, but also democratizes the use of advanced TAS algorithms.
1.4 Robotic Intent Signaling System
Students: Mitchell Scott, Shreyas Kadekodi, Caleb Escobedo, Clare Lohrmann
The creation of information channels between robots and humans is complicated and fraught with potential pitfalls; the goal being a simplistic system that effectively carries information from one party to another consistently and clearly.
While much work has gone into creating robot signals and modes of communication, most research seeks to answer the question “Does this system communicate what it was intended to?”, be it the robot’s path, intent, or status.
Research is conducted in a controlled environment, so the applicability of these systems to environments constrained by space or time is unknown.
We are currently examining the effectiveness of a projection-based trajectory system in a cluttered and fast paced environment.
Through this work we hope to determine when this method of communication is most effective, and if/when the environment becomes too crowded or too fast moving for the communication to be effective.
2. Publications
CRED: Counterfactual Reasoning and Environment Design for Active Preference Learning
Yi-Shiuan Tung, Gyanig Kumar, Wei Jiang, Bradley Hayes, Alessandro Roncone
Conference Paper
SOCIAL INTELLIGENCE
2026 IEEE International Conference on Robotics and Automation [ICRA]
PDF
BIB
Gaze-informed signatures of trust and collaboration in human-autonomy teams
Anthony J. Ries, Stéphane Aroca-Ouellette, Alessandro Roncone, Ewart J. de Visser
Journal Article
SOCIAL INTELLIGENCE
2025 Computers in Human Behavior: Artificial Humans
PDF
BIB
Implicitly Aligning Humans and Autonomous Agents through Shared Task Abstractions
Stéphane Aroca-Ouellette, Miguel Aroca-Ouellette, Katharina von der Wense, Alessandro Roncone
Conference Paper
SOCIAL INTELLIGENCE
2025 International Joint Conference on Artificial Intelligence [IJCAI]
PDF
BIB
Employing Laban Shape for Generating Emotionally and Functionally Expressive Trajectories in Robotic Manipulators
Srikrishna Bangalore Raghu, Clare Lohrmann, Akshay Bakshi, Jennifer Kim, Jose Caraveo Herrera, Bradley Hayes, Alessandro Roncone
Conference Paper
SOCIAL INTELLIGENCE
2025 International Conference on Robot and Human Interactive Communication [RO-MAN]
PDF
BIB
URL
CRED: Counterfactual Reasoning and Environment Design for Active Preference Learning
Yi-Shiuan Tung, Bradley Hayes, Alessandro Roncone
Workshop Paper
SOCIAL INTELLIGENCE
2025 RSS Workshop on Human-in-the-Loop Robot Learning: Teaching, Correcting, and Adapting
PDF
BIB
Towards Zero-Shot Coordination between Teams of Agents: The N-XPlay Framework
Ava Abderezaei, Chi-Hui Lin, Joseph Miceli, Naren Sivagnanadasan, Stéphane Aroca-Ouellette, Jake Brawer, Alessandro Roncone
Workshop Paper
SOCIAL INTELLIGENCE
2025 RSS Workshop on Scalable and Resilient Multi-Robot Systems: Decision-Making, Coordination, and Learning
PDF
BIB
Eyes on the Game: Deciphering Implicit Human Signals to Infer Human Proficiency, Trust, and Intent
Nikhil Hulle, Stéphane Aroca-Ouellette, Anthony J. Ries, Jake Brawer, Katharina von der Wense, Alessandro Roncone
Conference Paper
SOCIAL INTELLIGENCE
2024 IEEE International Conference on Robot and Human Interactive Communication [RO-MAN]
PDF
BIB
Generating Pattern-Based Conventions for Predictable Planning in Human-Robot Collaboration
Clare Lohrmann, Maria Stull, Alessandro Roncone, Bradley Hayes
Journal Article
SOCIAL INTELLIGENCE
2024 ACM Transactions on Human-Robot Interaction [THRI]
PDF
BIB
Workspace Optimization Techniques to Improve Prediction of Human Motion During Human-Robot Collaboration
Yi-Shiuan Tung, Matthew B. Luebbers, Alessandro Roncone, Bradley Hayes
Best Technical Paper Nominee!!
Conference Paper
SOCIAL INTELLIGENCE
2024 ACM/IEEE International Conference on Human-Robot Interaction [HRI]
PDF
BIB
Improving Robot Predictability via Trajectory Optimization Using a Virtual Reality Testbed
Clare Lohrmann, Ethan Berg, Bradley Hayes, Alessandro Roncone
Workshop Paper
SOCIAL INTELLIGENCE
2024 HRI Workshop on Virtual, Augmented, and Mixed-Reality [VAM-HRI]
PDF
BIB
Causal Influence Detection for Human Robot Interaction
Yi-Shiuan Tung, Himanshu Gupta, Wei Jiang, Bradley Hayes, Alessandro Roncone
Workshop Paper
SOCIAL INTELLIGENCE
2024 HRI Workshop on Causal Learning for Human-Robot Interaction
PDF
BIB
Stereoscopic Virtual Reality Teleoperation for Human Robot Collaborative Dataset Collection
Yi-Shiuan Tung, Matthew B. Luebbers, Alessandro Roncone, Bradley Hayes
Workshop Paper
SOCIAL INTELLIGENCE
2024 HRI Workshop on Virtual, Augmented, and Mixed-Reality [VAM-HRI]
PDF
BIB
Towards A Natural Language Interface For Flexible Multi-Agent Task Assignment
Jake Brawer, Kayleigh Bishop, Bradley Hayes, Alessandro Roncone
Workshop Paper
SOCIAL INTELLIGENCE
2023 AAAI Fall Symposium on Artificial Intelligence for Human-Robot Interaction [AI-HRI]
PDF
BIB
Hierarchical Reinforcement Learning for Ad Hoc Teaming
Stéphane Aroca-Ouellette, Miguel Aroca-Ouellette, Upasana Biswas, Katharina Kann, Alessandro Roncone
Extended abstract
Conference Paper
SOCIAL INTELLIGENCE
2023 International Conference on Autonomous Agents and Multiagent Systems [AAMAS]
PDF
BIB
Interactive Policy Shaping for Human-Robot Collaboration with Transparent Matrix Overlays
Jake Brawer, Debasmita Ghose, Kate Candon, Meiying Qin, Alessandro Roncone, Marynel Vázquez, and Brian Scassellati
Best Technical Paper Award!!
Conference Paper
SOCIAL INTELLIGENCE
2023 ACM/IEEE International Conference on Human-Robot Interaction [HRI]
PDF
BIB
Improving Human Legibility in Collaborative Robot Tasks through Augmented Reality and Workspace Preparation
Yi-Shiuan Tung, Matthew B. Luebbers, Alessandro Roncone, Bradley Hayes
Workshop Paper
SOCIAL INTELLIGENCE
2023 HRI Workshop on Virtual, Augmented, and Mixed-Reality [VAM-HRI]
PDF
BIB
Designing an AI Partner for Jigsaw classrooms
Jie Cao, Rachel Dickler, Marie Grace, Jeffrey B. Bush, Alessandro Roncone, Leanne M. Hirshfield, Marilyn A. Walker, Martha S. Palmer
Workshop Paper
SOCIAL INTELLIGENCE
2023 Workshop on Language-Based AI Agent Interaction with Children [AIAIC]
PDF
BIB
Bilevel Optimization for Just-in-Time Robotic Kitting and Delivery via Adaptive Task Segmentation and Scheduling
Yi-Shiuan Tung, Kayleigh Bishop, Bradley Hayes, Alessandro Roncone
Conference Paper
SOCIAL INTELLIGENCE
2022 IEEE International Conference on Robot & Human Interactive Communication [RO-MAN]
PDF
BIB
How to be Helpful? Supportive Behaviors and Personalization for Human-Robot Collaboration
Olivier Mangin, Alessandro Roncone, and Brian Scassellati
Journal Article
SOCIAL INTELLIGENCE
2022 Frontiers in Robotics and AI
PDF
BIB
Teaching Grounded Reading Skills via an Interactive Robot Tutor
Kayleigh Bishop, Bradley Hayes, Alessandro Roncone
Workshop Paper
SOCIAL INTELLIGENCE
2021 ACM International Conference on Human-Robot Interaction [HRI], Workshop on Robots for Learning
PDF
BIB
An Affordance-based Action Planner for On-line and Concurrent Human-Robot Collaborative Assembly
Francesca Stramandinoli, Alessandro Roncone, Olivier Mangin, Francesco Nori, and Brian Scassellati
Workshop Paper
SOCIAL INTELLIGENCE
2019 2nd ICRA International Workshop on Computational Models of Affordance in Robotics
Situated Human-Robot Collaboration: predicting intent from grounded natural language
Jake Brawer, Olivier Mangin, Alessandro Roncone, and Brian Scassellati
Conference Paper
SOCIAL INTELLIGENCE
2018 IEEE/RSJ International Conference on Intelligent Robots and Systems [IROS]
PDF
BIB
Preference-Based Assistance Prediction for Human-Robot Collaboration Tasks
Elena Corina Grigore, Alessandro Roncone, Olivier Mangin, and Brian Scassellati
Conference Paper
SOCIAL INTELLIGENCE
2018 IEEE/RSJ International Conference on Intelligent Robots and Systems [IROS]
PDF
BIB
The HRC Model set for Human-Robot Collaboration Research
Sofya Zeylikman, Sarah Widder, Alessandro Roncone, Olivier Mangin, and Brian Scassellati
Conference Paper
SOCIAL INTELLIGENCE
2018 IEEE/RSJ International Conference on Intelligent Robots and Systems [IROS]
PDF
BIB
Predicting Supportive Behaviors for Human-Robot Collaboration
Elena Corina Grigore, Olivier Mangin, Alessandro Roncone, and Brian Scassellati
Extended abstract
Conference Paper
SOCIAL INTELLIGENCE
2018 International Conference on Autonomous Agents and Multiagent Systems [AAMAS]
PDF
BIB
Transparent Role Assignment and Task Allocation in Human Robot Collaboration
Alessandro Roncone, Olivier Mangin, and Brian Scassellati
Conference Paper
SOCIAL INTELLIGENCE
2017 IEEE International Conference on Robotics and Automation [ICRA]
PDF
BIB
Learning Peripersonal Space Representation in a Humanoid Robot with Artificial Skin
Alessandro Roncone
Workshop Paper
EMBODIED INTELLIGENCE
2017 AAAI Matters
PDF
BIB