In this subteam, we focus on ensuring that humans and robots can interact safely in collaborative and cramped situations by simultaneously developing novel sensing hardware and motion control frameworks. This work is interdisciplinary in nature; it requires expertise in computer science, electrical engineering, control systems, material science, and a multitude of other fields. The HIRO Group’s research projects span across multiple research labs that are in constant communication. These complementary technologies are used to elicit natural, fluid interactions that focus on human safety in the presence of robotic manipulators. The hardware component of this project has led to the development of modular sensor units that can be placed anywhere on the surface of a robot manipulator to gather information about the robot’s immediate surroundings. Using the information provided by our sensor units, we have developed a control framework that allows robot manipulators to anticipate, detect, and react to external contact that could otherwise be harmful. Going forward, we plan to imbue robots with the ability to detect objects near and directly touching their surface with capacitive touch and tactile sensors. These additional data streams and others to be included in future sensor units will allow for experimentation in nonverbal communication, object hand-off, and movement in clutter.
Contents
1. Projects
1.1 Motion planning and trajectory optimization for contact-rich manipulation
Students: Nataliya Nechyporenko, Caleb Escobedo, Yaashia Gautam
Publications:
- N. Nechyporenko, C. Escobedo, S. Kadekodi, and A. Roncone, “CAT-RRT: Motion Planning that Admits Contact One Link at a Time,” in 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023. [PDF] [BIB] [Website]
People often make physical contact with their environment when manipulating objects. Here a person gently brushes some objects away while reaching for a target object.
In our recent work, we were able to mimic the reaching behavior with a robot using an algorithm called CAT-RRT. The robot reaches for the block while interacting with the balloon.
In our lab, we use sensor systems (such as a camera) to inform the robot of its suroundings and demonstrate our results in simulation and on real-life robots.
Imagine walking to your room with a plate of food in one hand and a bottle of water in the other. Then you see that the door is closed, what do you do? People tend to get creative and use their elbows or even feet to move the handle and push the door open. However, a robot would typically get stuck because it’s restricted to using fingertips for manipulating objects in the environment. In this research thread, we aim to equip robots with dexterous whole-body manipulation skills allowing them to tackle complex real-world tasks such as handling large objects to assist the elderly, navigating tight spaces for search-and-rescue, and manipulating clutter for warehouse operations. More specifically, we focus on motion planning and trajectory optimization algorithms that can reason about physical contact. We work with tools such as Drake, MoveIt!, and OMPL using Python and C++. If you are interested in learning more, please reach out!
Planning for contact can benefit from strong perception algorithms since we can anticipate certain interactions. For example, we can plan for more contact with soft, lightweight objects (e.g. tennis balls and water bottles) rather than with hard static objects (e.g. tables and walls). To this end, we have also made progress in the areas of computer vision and machine learning and looking to supplement this research with more students.
Likewise, we are looking to integrate our motion planning, controls, and perception work into a unified pipeline to demonstrate real-world robot capabilities such as picking fruit from a tree, cleaning up a cluttered space, or playing ball games. We are looking for passionate students who develop these demonstrations to showcase all of our work!
1.2 Plug-and-Play Sensor Units for Environmental Robotic Perception
Students: Mary West, Matt Strong, Caleb Escobedo
Publications:
- K. Watanabe, M. Strong, M. West, C. Escobedo, A. Aramburu, K. Chaitanya and A. Roncone, “Self-contained kinematic calibration of a novel whole-body artificial skin for human-robot collaboration,” in 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021. [PDF] [BIB]
The HIRO Group has begun the development of small, self-contained sensor units that can be placed on the surface of a robot manipulator to gather information about the robot’s environment. One of the initial projects in the HIRO Group focused on improving accuracy and reducing the time required to automatically locate sensors on the robot’s surface. In this work, a system was developed that calibrated each sensor unit with accuracies multiple times greater than that of previously developed state-of-the-art methods. With precise knowledge of the sensor unit’s position and orientation, we can locate objects or disturbances in the environment so that the robot can act intelligently, based on that data. The sensor units are currently embedded with IMU and proximity sensors for calibration and collision anticipation algorithms. The next generation of sensors will include capacitive and force sensing to allow high-resolution tactile feedback from touch events. In particular, we can use this data for tactile-visual sensor fusion and tactile feature extraction when interacting with physical objects.
1.3 Control Framework for Force Reduction and Human Anticipation
Students: Caleb Escobedo, Matt Strong, Mary West, Nataliya Nechyporenko
Publications:
- C. Escobedo, M. Strong, M. West, A. Aramburu, and A. Roncone, “Contact anticipation for physical human–robot interaction with robotic manipulators using onboard proximity sensors,” in 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021. [PDF] [BIB]
In order to facilitate ubiquitous human-robot interaction, human safety must be ensured while still allowing for meaningful contact between humans and robots. Humans can make contact with each other to share information about the environment or request attention for a particular interaction. For example, two people working in a crowded kitchen can tap each other on the shoulder to gain their attention or signal that something is happening where one cannot see. The HIRO Group has created a control framework that focuses on the need for humans to physically interact with their environment. The controller uses data from onboard and proprioceptive sensors to allow robots to both avoid collisions and allow for soft purposeful contact to be made by collaborators. After a gentle collision occurs, a reactive behavior causes the robot to move away from the contact location, allowing space for a collaborator to move through the area where contact was made. After the human has left the scene, the robot is able to continue with its previous requested or new trajectory without entering an error state. The control framework is constantly being improved to include information from multiple sensor sources in order to act on a detailed representation of the robot’s environment. Future work in this area will focus on gentle continuous contact interactions, low-level control measures that guarantee human safety, and integration with complex human-robot collaboration.
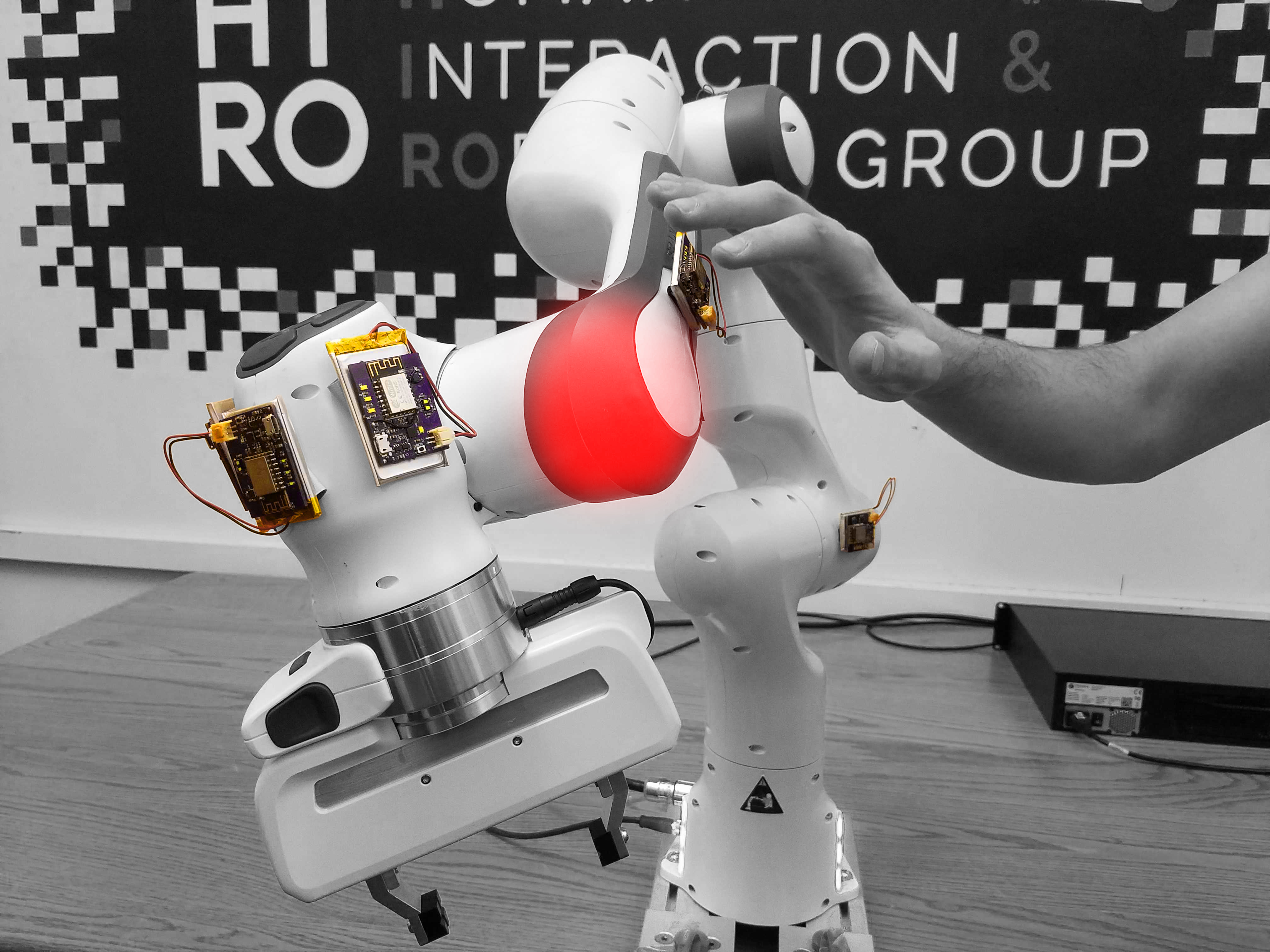
Anticipating contact with whole-body sensing.